
TM 164 Coil spring vibrations
In helical springs, the spring force is generated by the elastic deformation of a metal band wound in an Archimedean spiral. If a mass is attached to the spring, we refer to it as a spring–mass system. The resistance that the spring presents opposite of the elastic deformation is known as spring stiffness. It is a characteristic variable of the spring.
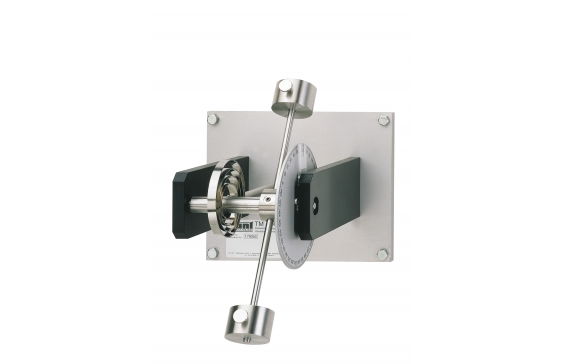
The TM 164 unit comprises a helical spring connected to a rotating lever. Masses can be attached to the lever at various distances. This creates a spring-mass system, which can be used to study the effects of the spring stiffness, mass and mass distribution on the oscillation frequency. The deflection angle can be read on an angle scale.
The experimental unit is designed to be fixed to a wall.
- torsional oscillations of a spring-mass system
Helical spring
- cross-section: 10x1mm
- spring length: approx. 800mm
- inner radius: 10mm
- outer radius: 50mm
- winding distance: 8,5mm
Sliding mass: 2x 0,5kg
Distance from mass to rotation axis
- 36…150mm
Deflection angle
- max. 360°
- graduation: 1°
Stopwatch: 1/100s
- investigate vibrations on a spring-mass system
- lever with sliding mass to deflect the helical spring
- adjustable distance of the mass to the rotation axis
- angle scale for reading the angle of deflection
- stopwatch to measure the oscillation period
- determine the natural frequency and the spring stiffness
- bracket for wall mounting
- determine the rigidity of a helical spring
- determine the natural frequency of a spring-mass system
- investigate the effect of mass and mass distribution