
TM 140 Free and forced torsional vibrations
Torsional vibrations are often observed in belt-driven systems. With appropriate excitation of resonances, large vibration amplitudes can occur, which can lead to strong loads on shafts and gears, potentially resulting in damage.
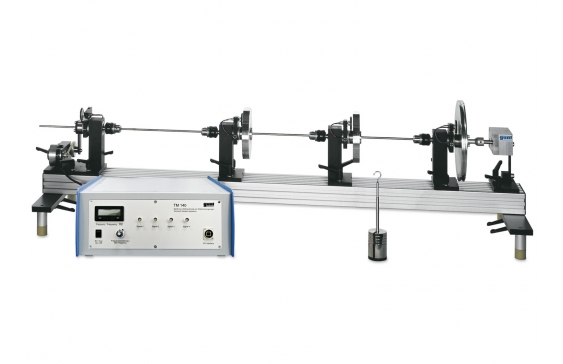
The TM 140 unit can be used to produce free and forced torsional vibrations and to study the effects of torsional stiffness, mass and damping on frequency and amplitude.
The core of the experimental unit is a metal torsion bar. Mass disks with different rotational inertias can be attached to the bar using clamping chucks. This allows a torsional vibration system to be created with up to three masses. The torsional stiffness can be adjusted by varying the effective bar length. An exciter unit driven by an electric motor is used to represent forced vibrations. The frequency can be adjusted and read on the control unit.
A damper makes it possible to set different degrees of damping. The torsional vibrations are picked up via rotary encoders on the bearings of the torsion bar and are available on the control unit as an electrical signal. All signals are also available via a USB port and can be transferred to a PC.
The GUNT software allows the signals to be recorded and analysed, for example recording a resonance curve or displaying the natural mode.
- investigation of torsional stiffness and torsional vibrations
- behaviour of two-mass and three-mass torsional oscillators
Torsion bar
- 1300mm
- Ø=6mm
- stainless steel
Rigidity: approx. 1,0Nm/rad/m
Mass disks
- Ø=150mm, approx. 2,7kg
- Ø=228mm, approx. 4,8kg
Exciter frequency: 1…20Hz
Damper coefficient: 0,25…3,5Nm/rad/s
230V, 50Hz, 1 phase
230V, 60Hz, 1 phase; 120V, 60Hz, 1 phase
UL/CSA optional
- experimental unit for investigating torsional vibrations and torsional stiffness
- 3 mass disks
- 4 freely positionable ball-bearing-mounted units with clamping chucks
- sealed oil damper
- exciter unit with drive crank; exciter amplitudes 1,4°, 1,8°, 2,4°
- 4 rotary angle sensors, 0,03V/°
- electrical exciter control unit for setting and displaying the exciter frequency and for powering the rotary encoder
- GUNT software for data acquisition via USB under Windows 7, 8.1, 10
- determine the torsional stiffness of a torsion bar
- determine the mass moments of inertia
- decay behaviour of torsional vibrations
- determine the damping in torsional vibrations
- forced torsional vibrations, resonance
- torsional vibration systems with multiple masses
- two-mass torsional oscillator
- three-mass torsional oscillator