
RT 050 Training system: speed control, HSI
This compact experimental unit offers every opportunity to learn the fundamentals of control engineering through experimentation on a speed control system.
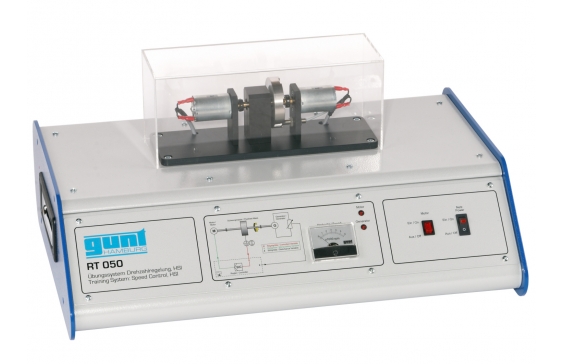
The experimental setup is mounted on a housing which accommodates all the electronics. A transparent protective cover permits safe observation of the experiments. A DC motor drives a shaft with a mass flywheel. The dial gauge allows the speed to be read off directly at any time. The speed is measured inductively using a speed sensor. The output signal from the sensor is sent to the software controller. The output signal from the controller influences the motor current. A generator acting as a mechanical resistance to shaft rotation can be activated by the software to study the influence of disturbance variables.
The powerful state-of-the-art software is an integral part of the training system, embodying the principle of hardware/software integration (HSI). It enables the experiments to be conducted and evaluated in a user-friendly manner. The software has network capability. The link between the experimental unit and the PC is made via a USB port.
- experimental unit with speed control system
- extensive range of experiments on fundamentals of control engineering
- state-of-the-art software for all experimental units of the RT 010 – RT 060 series, with extensive controller and recorder functions
- software-based simulation of the controlled system
Motor
- max. speed: 4500min -1
- max. motor power output: 10W
- max. torque: 1,7Ncm
Generator
- max. speed: 4500min -1
- max. power output: 10W
- max. torque: 1,7Ncm
Tachometer (analogue): 0…6000min -1
Software controller configurable as P, PI and PID controller
Software
- process schematic with controller type selection (manual, continuous controller, programmer)
- time functions
- simulation function
- disturbance variable input
230V, 50Hz, 1 phase
230V, 60Hz, 1 phase
120V, 60Hz, 1 phase
UL/CSA optional
- experimental unit for control engineering experiments
- speed control of a DC motor with shaft and flywheel
- transparent protective cover for motor/generator set
- inductive speed sensor
- generation of disturbance variables by adjustable generator load
- software-based controlled system simulation
- process schematic on front panel
- networkable GUNT software
- GUNT software with control functions and data acquisition via USBunder Windows 7, 8.1, 10
- fundamentals of control engineering based on the example of a speed control system with PT1 behaviour
- open loop control response
- effects of different controller parameters and methods on the response of the closed loop system
- recording of step responses
- reference variable
- disturbance variable
- controller optimisation
- software-based controlled system simulation
- comparison of different controlled system parameters